高性能I/O
Linux下的IO模型
什么是I/O
首先什么是I/O?
I/O(input/output),即输入输出设备,现实中键盘和鼠标是输入设备,显示器是输出设备,在《深入理解计算机系统》第一章1.7.4节中,有说到:文件是对I/O设备的抽象表示,文件就是字节序列,仅此而已。每个I/O设备,包括磁盘、键盘、显示器,甚至网络,都可以看成文件。
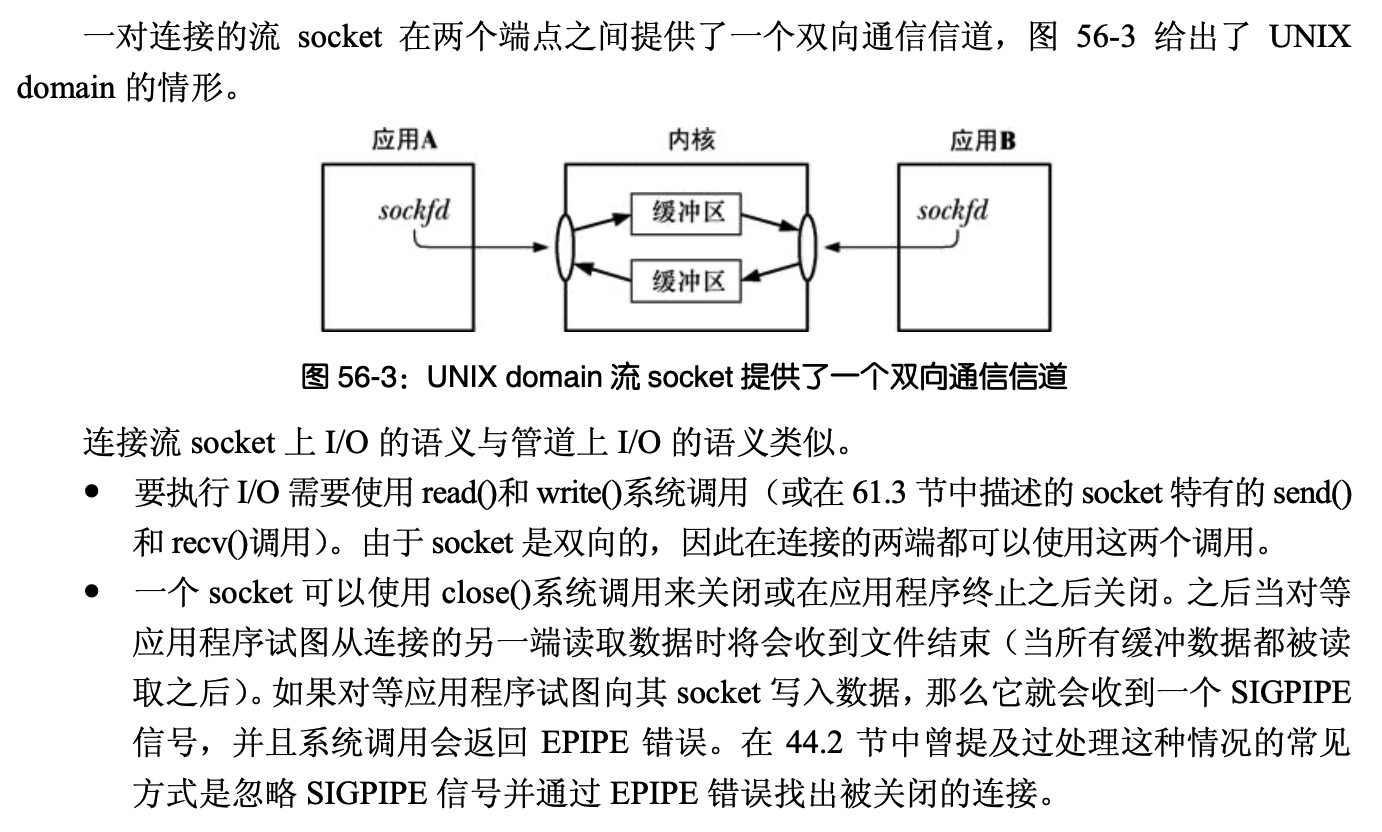
所以,不难理解在Linux的API中,为什么发送TCP数据包可以调用write(),接收数据包可以调用read()了,在《Linux-UNIX系统编程手册》中第56.5.4节流socket I/O中有描述:
《Netty权威指南 第2版》1.1.1节也有描述:
Linux的内核将所有外部设备都看作一个文件来操作,对一个文件的读写操作会调用内核提供的系统命令,返回一个file descriptor(fd,文件描述符)。而对一个socket的读写也会有相应的描述符,称为socketfd(socket描述符),描述符就是一个数字,它指向内核中的一个结构体(文件路径,数据去等一些属性)
所以,为什么c++有如下接收数据的代码(第一个参数socket_fd就是socket描述符,它的创建过程这里省略了):
while(true){
// ...
// 调用read等待网络数据的到来,期间一直阻塞
size_t len = read(socket_fd, buffer, kMaxBufferLen);
// 调用write把要发送的数据写入到socket缓冲区,等待发送
write(socket_fd, buffer, len);
// ...
}
既然网络也被抽象为文件,那么如何使读写(收发)比较快,拥有很高的性能就很关键了,《UNIX网络编程卷1》第6.2节 I/O模型里面介绍了5种模型,我们来一起看看。
5种I/O模型
- 阻塞式I/O
- 非阻塞式I/O
- I/O复用(select和poll)
- 信号驱动式I/O(SIGIO)
- 异步I/O(POSIX的aio_系列函数)
对于Linux C++,后面2种不常用,主要看前3种即可。对于Java,NIO类库封装了所以异步I/O的细节,也只要了解一下操作系统支持异步I/O即可。
阻塞式I/O
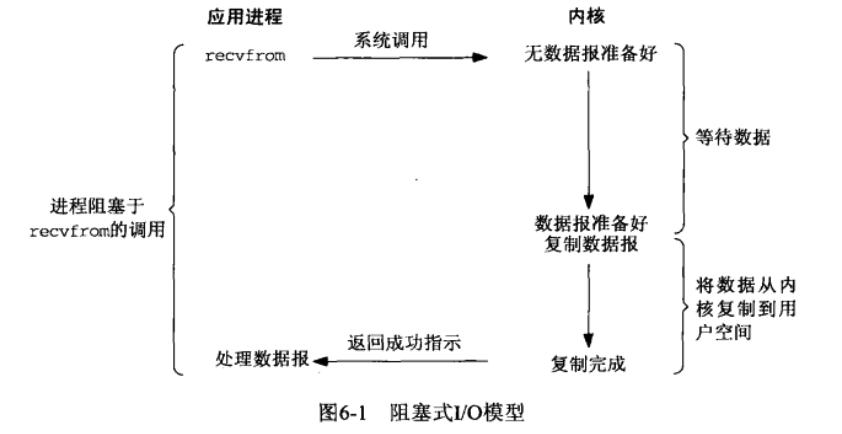
最常用最基本的I/O模型,缺省情况下,所有的文件操作都是阻塞的。以UDP为例,在进程空间中调用recvfrom(接收数据),其系统调用直到数据包到达,且被复制到应用进程的缓冲区中或者发送错误时才返回,在此期间一直会等待。进程在从调用recvfrom开始,到它返回的整段时间内都是被阻塞的,因此被称为阻塞I/O模型。
recvfrom的API原型如下:
/**
* receive a message from a socket
* @param s: socket描述符
* @param buf: UDP数据报缓存区(包含所接收的数据)
* @param len: 缓冲区长度
* @param flags: 调用操作方式(一般设置为0)
* @param from: 指向发送数据的客户端地址信息的结构体(sockaddr_in需类型转换)
* @param from_len: 指针,指向from结构体长度值
* @return These calls return the number of bytes received, or -1 if an error occurred
*/
int recvfrom(int socket, void *buf, int len, unsigned int flags,
struct sockaddr *from, int *from_len);
非阻塞式I/O
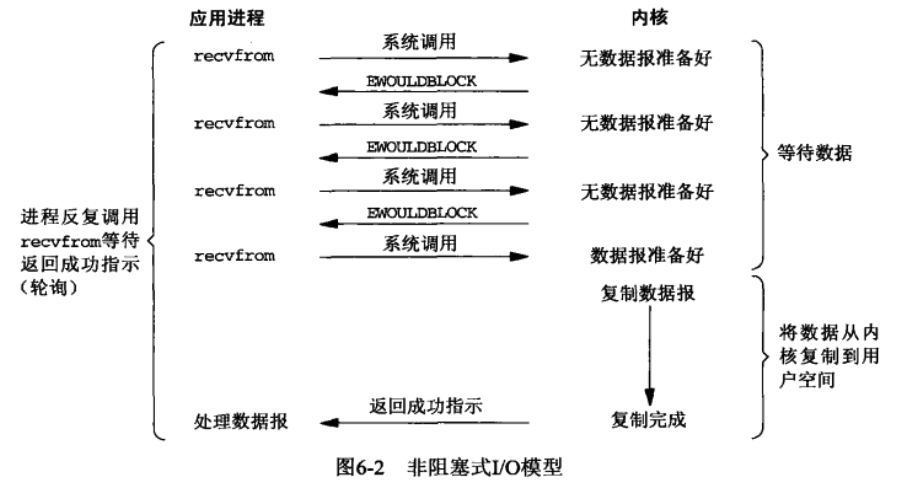
和阻塞式I/O模型的区别,就是调用recvfrom后立即返回,通过返回值判断是否有数据(EWOULDBLOCK错误代表没有数据)。所以一般搭配sleep使用,但是如何确定轮询检查的间隔,看应用场景。
I/O复用模型
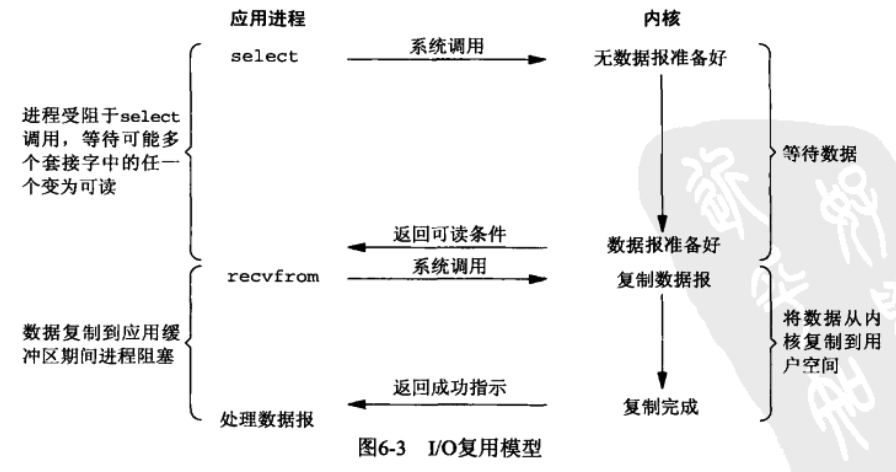
这个模型是我们这一章的重点(后面会详细介绍),主要以Linux提供的select/poll/epoll来实现。
-
select/poll:进程通过将一个或多个fd传递给select或poll系统调用,阻塞在select操作上,这样select/poll可以帮我们侦测多个fd是否处于就绪状态。select/poll是顺序扫描fd是否就绪,而且支持的fd数量有限(默认1024个,f d受限,也即意味着默认情况下最大只能支持1024个连接),因此它的使用受到了一些制约。
-
epoll:使用基于事件驱动的方式代替顺序扫描,因此性能更高。当有fd就绪时,立即进行回调处理。
它的原称是I/O multiplexing(有时候“I/O复用”这个翻译,会让人有点疑惑,复用在那里?为什么叫做I/O复用?),即:多路网络连接复用一个io线程的意思,虽然不是很精确,但是能让我们明白为什么叫复用。
再引用来自于 [知乎:IO 多路复用是什么意思?罗志宇的回答] 一图:
I/O multiplexing 这里面的 multiplexing 指的其实是在单个线程通过记录跟踪每一个Sock(I/O流)的状态(对应空管塔里面的Fight progress strip槽)来同时管理多个I/O流. 发明它的原因,是尽量多的提高服务器的吞吐能力。
在同一个线程里面, 通过拨开关的方式,来同时传输多个I/O流, (学过EE的人现在可以站出来义正严辞说这个叫“时分复用”了)。
什么,你还没有搞懂“一个请求到来了,nginx使用epoll接收请求的过程是怎样的”, 多看看这个图就了解了。提醒下,ngnix会有很多链接进来, epoll会把他们都监视起来,然后像拨开关一样,谁有数据就拨向谁,然后调用相应的代码处理。
IO复用形成原因具体可以参考这里 IO复用:
如果一个I/O流进来,我们就开启一个进程处理这个I/O流。那么假设现在有一百万个I/O流进来,那我们就需要开启一百万个进程一一对应处理这些I/O流(——这就是传统意义下的多进程并发处理)。思考一下,一百万个进程,你的CPU占有率会多高,这个实现方式及其的不合理。所以人们提出了I/O多路复用这个模型,一个线程,通过记录I/O流的状态来同时管理多个I/O,可以提高服务器的吞吐能力
信号驱动式I/O(不常用)
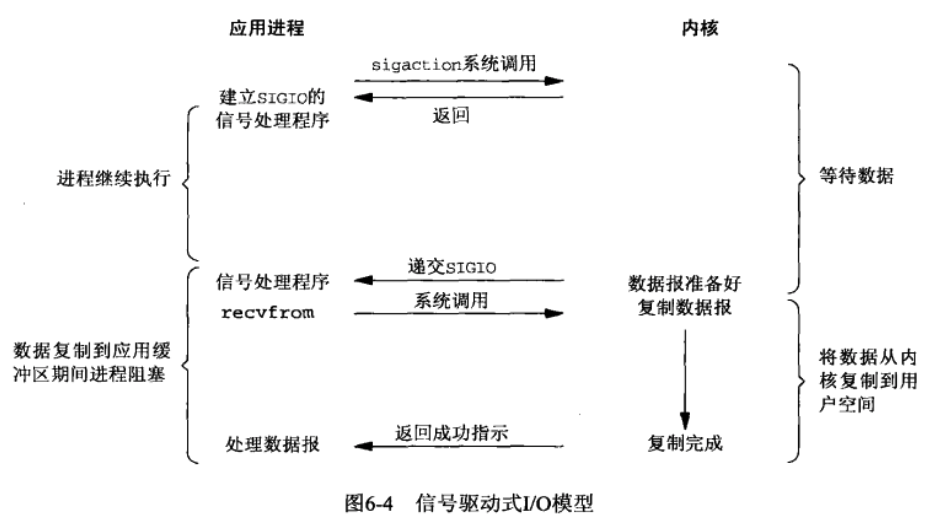
信号驱动式I/O是指预先告知内核,使得当某个描述符上发生某事时,内核使用信号通知相关进程。如上图,先开启套接接口信号驱动I/O功能,并通过系统调用sigaction执行一个信号处理函数(此系统调用立即返回,进程继续工作,他是非阻塞的)。当数据准备就绪时,就为该进程生产一个SIGIO信号,通过信号回调通知应用程序调用recvfrom来读取数据,并通知主循环函数处理数据。
异步I/O模型(不常用)
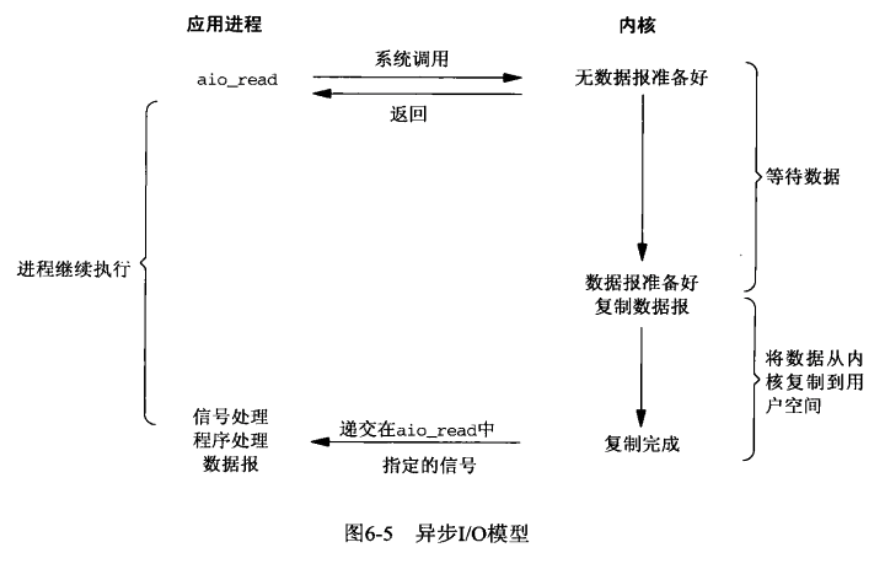
异步I/O:告知内核启动某个操作,并让内核在整个操作完成后(包括将数据从内核复制到用户自己的缓冲区)通知我们。这种模型与信号驱动模型的主要区别是:信号驱动I/O由内核通知我们何时可以开始一个I/O操作,而异步I/O模型由内核通知我们I/O操作何时已经完成。
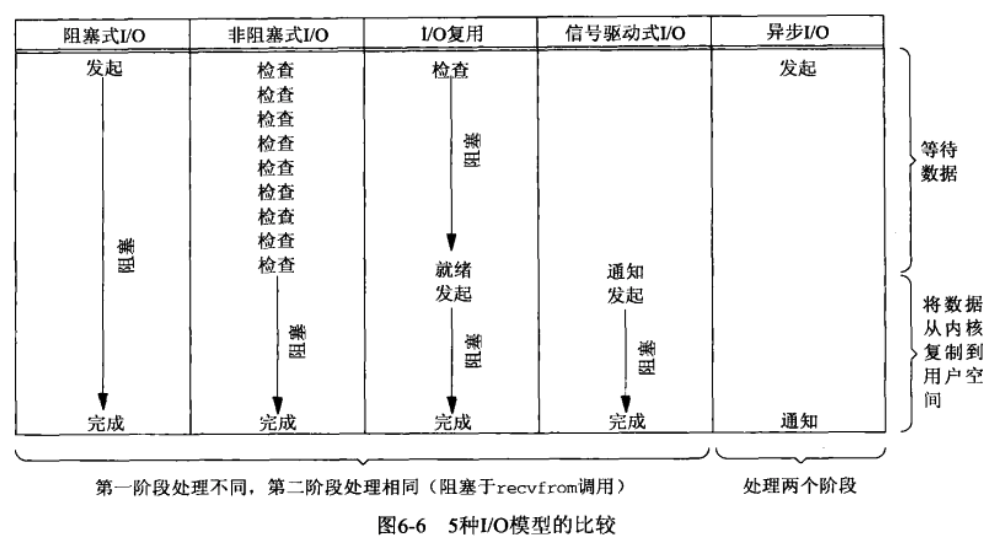
5种模型对比
高性能实现:I/O复用
其实最重要的就是这一节吧,实现大量TCP连接的答案就是epoll技术(Windows下是IOCP技术),但是并不是每种场合下epoll都适用:
- 比如epoll是linux特有的,windows有iocp(完成端口)的技术,所以如果是windows服务器,就不适合。同样macos下是kqueue,原理上和epoll类似。
- epoll适合连接数多,但是都不活跃的场景,比如IM(用户虽然在线,但并不是时时刻刻都在发消息)、消息推送等。select/poll适合对吞吐量要求高,连接数少(千级别)的场景,比如音视频传输(每一秒都在传输大量的数据)、文件传输等,当然对于这些对速度有要求的实时传输业务,可能更好的选择是UDP协议。
下面,让我们通过例子来看一下三种I/O复用模型的差异,同时介绍2种设计模式,让我们更深入的掌握epoll的用法。
架构模型的演变
在正式介绍I/O复用模型前,我们先来一点开胃菜。看看I/O复用出现的背景,以及在没有这种技术之前,前辈门是如何来进行网络服务器编程的。
架构模型的演变涉及面太广太大,这里只罗列2种最常见的场景(UDP和TCP类似),更多的内容读者可自行查阅:
- Web(HTTP)服务器(更多内容:互联网架构演进模型(一)、互联网架构演进模型(二)、千万级并发下,淘宝服务端架构如何演进?)
- 单机网站架构
- 应用与数据分离
- 使用缓存改善网站性能
- 应用服务器集群
- 数据库读写分离
- 使用反向代理和CDN加速网站响应
- 数据库的分库分表(垂直/水平拆分)及分布式文件系统
- 使用NoSQL和搜索引擎
- 按业务模块拆分
- 服务化及中间件
- 微服务和分布式(上面的文章没有提到)
- 云(SAAS、PAAS)(上面的文章没有提到)
- 游戏(TCP)服务器(更多内容:游戏服务器的架构演进(完整版))
- 第一代网游服务器(单线程无阻塞)
- 第二代网游服务器(分区分服)
- 第三代网游服务器(三层架构 -> cluster -> 无缝地图)
从上面2种经典的服务演进可以看出,都是由单机版进化而来,这里为了简单起见,我们只从最基础的单机应用的视角来介绍,下面我们一起来看2个具体的例子。
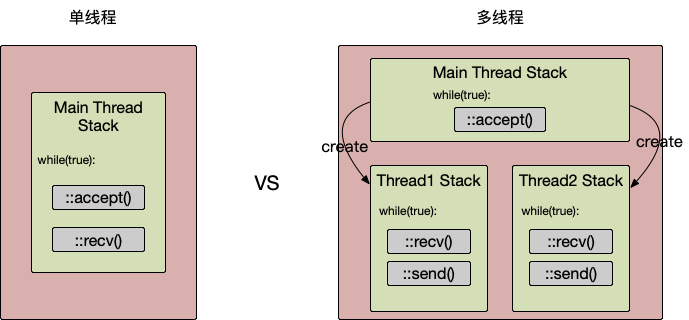
单线程+阻塞I/O
我们先来看一个TCP服务器最基础的实现(基于单进程+单线程方式),以下是一个示例:
server.cpp
#include <iostream>
#include <cstring>
#include <cerrno>
#include <netinet/in.h> // ipv4: PF_INET,sockaddr_in ,v6:PF_INET6,sockaddr_in6
#include <sys/socket.h> // socket,bind,listen,accept
#include <unistd.h> // read,close
#include <arpa/inet.h> // inet_addr
const int kSocketError = -1;
/** @fn main
* @brief 演示socket的基础调用demo,使用了默认同步I/O阻塞+单线程的方式,即同时只能处理1个连接,直到这个连接断开后才能处理下一个连接。
* @return
*/
int main() {
// 创建监听socket的实例,返回socket文件句柄
int listenFd = ::socket(PF_INET, SOCK_STREAM, 0);
if (listenFd == kSocketError) {
std::cout << "create socket error:" << errno << std::endl;
return 0;
}
std::cout << "create socket" << std::endl;
struct sockaddr_in addr{};
addr.sin_family = AF_INET;
addr.sin_port = htons(8088);
addr.sin_addr.s_addr = inet_addr("127.0.0.1");
// 绑定到127.0.0.1:8088的本地回环地址,客户端连接时的服务器IP和端口要保持和这里一致
int ret = ::bind(listenFd, (sockaddr *) &addr, sizeof(addr));
if (ret == kSocketError) {
std::cout << "bind socket error:" << errno << std::endl;
return 0;
}
std::cout << "bind success,start listen..." << std::endl;
// 标识文件描述符为被动socket,这个socket会被用来接收来自其他(主动)socket的连接
ret = ::listen(listenFd, SOMAXCONN);
if (ret == kSocketError) {
std::cout << "listen error:" << errno << std::endl;
return 0;
}
// 服务要不停的执行,本质上就是个死循环
while (true) {
struct sockaddr_in peerAddr{};
socklen_t sockLen = sizeof(sockaddr_in);
// accept()系统调用在文件描述符 sockfd 引用的监听流 socket 上接受一个接入连接
// 如果没有未决的连接,会一直阻塞直到有连接请求到达为止。
int fd = ::accept(listenFd, (sockaddr *) &peerAddr, &sockLen);
if (fd == kSocketError) {
return 0;
}
std::cout << "new connect coming,accept..." << std::endl;
while (true) {
char buffer[1024] = {};
// 接收来自于客户端的数据,如果没有数据到来,则一直阻塞
ssize_t len = recv(fd, buffer, sizeof(buffer), 0); // wait
if (len == kSocketError) {
std::cout << "recv error:" << errno << std::endl;
break;
} else if (len == 0) {
std::cout << "recv error:" << errno << std::endl;
break;
} else {
std::cout << "recv: " << buffer << ",len=" << len << std::endl;
// echo,给客户端回复相同的内容,就像回声一样
len = send(fd, buffer, len, 0);
if (len == kSocketError) {
std::cout << "send error:" << errno << std::endl;
break;
}
}
}
::close(fd);
std::cout << "remote " << ::inet_ntoa(peerAddr.sin_addr) << "close connection" << std::endl;
}
return 0;
}
client.cpp
#include <iostream>
#include <cerrno>
#include <thread>
#include <sys/socket.h> // bind,connect
#include <netinet/in.h> // sockaddr_in
#include <arpa/inet.h> // inet_addr()
#include <unistd.h> // close
const int kSocketError = -1;
int main() {
// 创建实例
int fd = socket(PF_INET, SOCK_STREAM, 0);
if (fd == kSocketError) {
std::cout << "socket error:" << errno << std::endl;
return 0;
}
struct sockaddr_in serverIp{};
serverIp.sin_family = AF_INET;
serverIp.sin_port = htons(8088);
serverIp.sin_addr.s_addr = inet_addr("127.0.0.1");
// 连接远端tcp server
std::cout << "connect remote" << std::endl;
int ret = ::connect(fd, (sockaddr *) &serverIp, sizeof(serverIp));
if (ret == kSocketError) {
std::cout << "connect error:" << errno << std::endl;
return 0;
}
char buffer[1024] = {0};
char recvBuffer[1024] = {0};
for (int i = 0; i < 10; ++i) {
std::this_thread::sleep_for(std::chrono::seconds(1));
int len = sprintf(buffer, "hello %d", i);
// 发送
ret = ::send(fd, buffer, len, 0);
if (ret == kSocketError) {
std::cout << "send error:" << errno << std::endl;
break;
}
// 接收应答,如果服务没有相应,则阻塞
ret = ::recv(fd, recvBuffer, sizeof(recvBuffer), 0);
if (ret == kSocketError) {
std::cout << "send error:" << errno << std::endl;
break;
}
std::cout << "recv from:" << recvBuffer << std::endl;
}
::close(fd);
return 0;
}
这个例子有什么问题?我们使用g++编译后,实际运行,当启动第二个client程序的时候,我们会发现 connect() 连不上去,为什么?
来分析一下这段代码:
// 死循环,持续监听,只要有新连接到来,accept就会返回一个与客户端建立了连接的socket fd,此时就可以通信了
while (true) {
// ...
// 没有新的连接到来accept会一直阻塞
int fd = ::accept(listenFd, (sockaddr *) &peerAddr, &sockLen);
// ...
while (true) {
char buffer[1024] = {};
// recv会一直阻塞(可以设置O_NONBLOCK变成非阻塞I/O,但默认是阻塞的),直到:
// 1. 客户端发送数据
// 2. 客户端调用close()断开连接
ssize_t len = recv(fd, buffer, sizeof(buffer), 0);
// ..
}
// ...
}
这里有2个死循环,最外层的循环用以监听新的客户端连接的到来,里面的循环则通过 recv() 系统调用来接收客户端发来的数据,直到客户端关闭,recv() 返回0,此时循环退出。执行到 accept() 开始接受下一个客户端的连接请求。
我们发现,这其实是一个串行的过程,即同一时间,只能接收1个客户端连接,其他的连接都得排队,这明显不合理,C/S架构变成了P2P架构。通常改进的方式有2种:
- 使用非阻塞I/O+轮询
- 使用多线程+阻塞I/O
第一种方式,需要至少2个线程配合,1个线程调用 accept() 处理新连接并且把socket fd加入到一个全局链表,另1个线程则从这个链表种每隔一定时间就进行o(n)级别的遍历,对每一个socket fd调用 recv() 来检查客户端是否发来数据,然后处理。
第二种方式,也是我们接下来会介绍的方式,相比第一种,它的优点是简单,及时性好。缺点是一个连接一个线程,内存占用会更多,且操作系统对线程数量有所限制。
多线程+阻塞I/O
为了解决单进程单线程下只能同时处理一个连接的问题,我们引入多线程技术,核心思路是把 recv() 放在单独的线程中执行,这样最外层的while循环得以执行到 accept() ,即意味着可接收新的连接的到来,真正的实现了服务器的功能,可以处理很多个TCP客户端。
下面是一个实例(注意,其他部分没变,只是在上一节中while循环的代码中,引入了线程而已):
// 死循环,永不退出
while (true) {
struct sockaddr_in peerAddr{};
socklen_t sockLen = sizeof(sockaddr_in);
// will sleep, until one connection coming
int fd = ::accept(listenFd, (sockaddr *) &peerAddr, &sockLen);
if (fd == kSocketError) {
return 0;
}
std::cout << "new connect coming,accept..." << std::endl;
// 改进:lamda表达式,这是一个匿名函数
auto proc = [fd, peerAddr]() {
while (true) {
char buffer[1024] = {};
// 没有数据时会阻塞
ssize_t len = recv(fd, buffer, sizeof(buffer), 0); // wait
if (len == kSocketError) {
std::cout << "recv error:" << errno << std::endl;
break;
} else if (len == 0) {// 客户端端口连接了,直接结束
std::cout << "recv error:" << errno << std::endl;
break;
} else {
std::cout << "recv" << ::inet_ntoa(peerAddr.sin_addr) << ":" << peerAddr.sin_port
<< " " << buffer << ",len=" << len << std::endl;
// echo
len = send(fd, buffer, len, 0);
if (len == kSocketError) {
std::cout << "send error:" << errno << std::endl;
break;
}
}
}
// tcp是全双工通信,我们也需要主动关闭,否则会耗尽系统的文件句柄资源
::close(fd);
std::cout << "remote " << ::inet_ntoa(peerAddr.sin_addr) << "close connection" << std::endl;
}; // end lamda
// 启动c++11标准线程库,可跨平台,头文件是<thread>
// proc是一个匿名函数,线程构造完成,自动启动后就会回调执行
std::thread thread(proc);
// 分离线程,主线程结束时继续存在;线程结束后,立马回收资源。
thread.detach();
// 继续往下执行,也就是下一个while的循环,即执行到::accept()部分后阻塞,
// 直到下一个连接到来
}
上面的代码,通过在不同的线程中处理 accept() 和 recv() 2个会导致阻塞的调用,这样就拥有了并行的能力,可以同时处理新连接和客户端发来的数据了。PS:main()函数本身就被一个线程调用,我们称之为主线程。
但是,线程数量在Linux中是有限制的,在CentOS下:
$ cat /proc/sys/kernel/thread-max
7765
另外,每启动一个线程,都会付出额外的内存代价:
$ ulimit -s
8192
下面有一组数据:
线程数 VIRT(虚拟内存) RES(物理内存)
1 14696(14MB) 852(0.8MB)
11 96788(94MB) 1100(1MB)
101 834428(814MB) 1628(1.5MB)
关于VIRT和RES的区别,可以参考这里:linux top命令 实存(RES)与虚存(VIRT)详解
堆、栈分配的内存,如果没有使用是不会占用实存的,只会记录到虚存。 如果程序占用实存比较多,说明程序申请内存多,实际使用的空间也多。 如果程序占用虚存比较多,说明程序申请来很多空间,但是没有使用。
因为线程数量的限制和创建线程代价很大的问题(尽管可以使用线程池一定程度解决,但因为线程数量的限制还是无法实现单机1万个连接以上),实际中很少会这样来实现。
非阻塞I/O
在游戏服务器的早期,使用过这种方式,因为不是我们的重点,所以我们这里就不再详细描述。这种单进程+非阻塞I/O可以配合多线程来实现更高的性能,但是实现复杂,要考虑多线程面临的各种问题(死锁、同步),所以不推荐。可以参考这里:游戏服务器的架构演进(完整版)
三种I/O复用模型
下面来看一下,操作系统层面给我们提供的解决方案。
我们来回顾一下这三种模型:
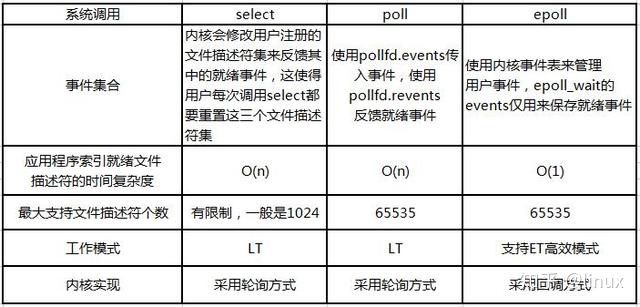
- select/poll:进程通过将一个或多个fd传递给select或poll系统调用,阻塞在 select() 操作上,这样select/poll可以帮我们侦测多个fd是否处于就绪状态。select/poll是顺序扫描fd是否就绪,其中select支持的fd数量有限(最大默认支持1024个连接),但是在各个操作系统上都支持,也因此它的使用受到了一些制约。而poll没有最大数量的限制,但是随着连接数的增多,性能会直线下降(o(n)时间复杂度)。
- epoll:使用基于事件驱动的方式代替顺序扫描,因此性能更高(o(1)时间复杂度)。当有fd就绪时,立即进行回调处理。
下面看一下具体的代码。
select/poll
因为poll和select类似,这里的代码就以 select 为例来说明:
#include <iostream>
#include <cstring>
#include <cerrno>
#include <thread> // thread
#include <netinet/in.h> // ipv4: PF_INET,sockaddr_in ,v6:PF_INET6,sockaddr_in6
#include <sys/socket.h> // socket(),bind(),listen(),accept()
#include <unistd.h> // read(),close()
#include <arpa/inet.h> // inet_addr()
#include <fcntl.h> // fcntl()
#include <sys/select.h> // select()
#include <vector> // vector
const int kSocketError = -1;
/** @fn main
* @brief 演示socket的基础调用demo,使用了select I/O复用模型,主要包括select、
* FD_CLR()、FD_ISSET()、FD_SET()、FD_ZERO()等几个函数(Linux下执行man select命令查看API说明)。
* 优点:
* 1. 相比多线程方案,这里所有的处理都在1个线程上,不用考虑线程并发带来的死锁和同步等问题,内存占用更低,开发更简单。
* 2. 相比epoll和poll,移植性更好,在windows\mac等平台都支持。
* 缺点:
* 1. o(n)级别顺序扫描,效率较低;
* 2. select最大只支持1024个连接,而poll没有这个限制,但是o(n)级别的扫描,链接数越多,性能则越低。
*
* @return
*/
int main() {
int listenFd = 0;
int ret = 0;
int yesReuseAddr = 1;
struct sockaddr_in addr{};
std::vector<int> connections; // 已建立的连接
struct timeval tv{}; // select超时
fd_set readFds; // select 可读fd集合
int maxFd = 0; // select 最大的fd
char recvBuffer[1024] = {0}; // 接收缓冲区
listenFd = ::socket(PF_INET, SOCK_STREAM, 0);
if (listenFd == kSocketError) {
std::cout << "create socket error:" << errno << std::endl;
return 0;
}
std::cout << "create socket" << std::endl;
// non-block
ret = ::fcntl(listenFd, F_SETFL, O_NONBLOCK);
if (ret == kSocketError) {
std::cout << "fcntl error:" << errno << std::endl;
return 0;
}
// SO_REUSEADDR
if (::setsockopt(listenFd, SOL_SOCKET, SO_REUSEADDR, &yesReuseAddr, sizeof(yesReuseAddr)) == kSocketError) {
std::cout << "setsockopt error:" << errno << std::endl;
return 0;
}
addr.sin_family = AF_INET;
addr.sin_port = htons(8088);
addr.sin_addr.s_addr = inet_addr("127.0.0.1");
ret = ::bind(listenFd, (sockaddr *) &addr, sizeof(addr));
if (ret == kSocketError) {
std::cout << "bind socket error:" << errno << std::endl;
return 0;
}
std::cout << "bind success,start listen..." << std::endl;
// 标识文件描述符为被动socket
ret = ::listen(listenFd, SOMAXCONN);
if (ret == kSocketError) {
std::cout << "listen error:" << errno << std::endl;
return 0;
}
for (;;) {
tv.tv_sec = 30;
tv.tv_usec = 0;
// select函数会清空各个集合,每次都需要加入
FD_ZERO(&readFds);
// Listen的socket加入监听
FD_SET(listenFd, &readFds);
maxFd = listenFd;
// 已连接的socket加入监听
for (const auto &sockFd : connections) {
FD_SET(sockFd, &readFds);
if (sockFd > maxFd) {
maxFd = sockFd;
}
}
ret = ::select(maxFd + 1, &readFds, nullptr, nullptr, &tv);
if (ret == -1) {
std::cout << "select error:" << errno << std::endl;
continue;
} else if (ret == 0) {
std::cout << "select timeout:" << errno << std::endl;
continue;
}
if (FD_ISSET(listenFd, &readFds)) {
int clientFd = ::accept(listenFd, nullptr, nullptr);
if (clientFd == kSocketError) {
std::cout << "accept error:" << clientFd << std::endl;
continue;
}
std::cout << "new connect coming" << std::endl;
connections.push_back(clientFd);
if (clientFd > maxFd) { // update
std::cout << "update maxSock ,before:" << maxFd << ",now:" << clientFd << std::endl;
maxFd = clientFd;
}
FD_SET(clientFd, &readFds); // 加入到监听列表
} else {
// select的缺点,每一次都需要o(n)级别的遍历
for (auto it = connections.begin(); it != connections.end();) {
int sockFd = *it;
if (!FD_ISSET(sockFd, &readFds)) { // 没有数据,直接下一个
++it;
continue;
}
// 获取客户端IP
struct sockaddr_in peer{};
socklen_t len = sizeof(sockaddr_in);
if (::getpeername(sockFd, (sockaddr *) &peer, &len) == kSocketError) {
std::cout << "getpeername error" << errno << std::endl;
++it;
continue;
}
// 因为上面通过FD_ISSET()检查了有数据,所以不会阻塞。
// 但通常情况下,应该在accept()返回sockfd之后,行设置O_NONBLOCK显示声明为非阻塞I
ret = ::recv(sockFd, recvBuffer, sizeof(recvBuffer), 0);
if (ret == 0) { // EOF
std::cout << "client " << sockFd << " close ths connection, " << inet_ntoa(peer.sin_addr) << ":"
<< ::ntohs(peer.sin_port) << std::endl;
FD_CLR(sockFd, &readFds);
::close(sockFd);
it = connections.erase(it);
} else if (ret == -1) {
std::cout << "recv error:" << errno << std::endl;
FD_CLR(sockFd, &readFds);
::close(sockFd);
it = connections.erase(it);
} else {
std::cout << "recv from " << inet_ntoa(peer.sin_addr) << ":" << ::ntohs(peer.sin_port)
<< ": " << recvBuffer << ",len=" << ret << std::endl;
// echo
::send(sockFd, recvBuffer, ret, 0);
++it;
}
}
}
}
return 0;
}
select() 和 poll() 存在的问题(《Linux-UNIX系统编程手册 63.2.5章》):
- 每次调用 select()或 poll(),内核都必须检查所有被指定的文件描述符,看它们是否处 于就绪态。当检查大量处于密集范围内的文件描述符时,该操作耗费的时间将大大超过接下来的操作。
- 每次调用 select()或 poll()时,程序都必须传递一个表示所有需要被检查的文件描述符 的数据结构到内核,内核检查过描述符后,修改这个数据结构并返回给程序。(此外, 对于 select()来说,我们还必须在每次调用前初始化这个数据结构。)对于 poll()来说, 随着待检查的文件描述符数量的增加,传递给内核的数据结构大小也会随之增加。当检 查大量文件描述符时,从用户空间到内核空间来回拷贝这个数据结构将占用大量 的 CPU 时间。对于 select()来说,这个数据结构的大小固定为 FD_ SETSIZE,与待检 查的文件描述符数量无关。
- select()或 poll()调用完成后,程序必须检查返回的数据结构中的每个元素,以此查明 哪个文件描述符处于就绪态了。
上述要点产生的结果就是随着待检查的文件描述符数量的增加,select()和 poll()所占用的 CPU 时间也会随之增加(更多细节请参见 63.4.5 节)。对于需要检查大量文件描述符的程序来 说,这就产生了问题。
我们接下来要讨论的信号驱动 I/O 以及 epoll 都可以使内核记录下进程中感兴趣的文件描 述符,通过这种机制消除了 select()和 poll()的性能延展问题。这种解决方案可根据发生的 I/O事件来延展,而与被检查的文件描述符个数无关。结果就是,当需要检查大量的文件描述符 时,信号驱动 I/O 和 epoll 能提供更好的性能表现。
epoll API 的主要优点如下。
- 当检查大量的文件描述符时,epoll 的性能延展性比 select()和 poll()高很多。
- epoll API 既支持水平触发也支持边缘触发。与之相反,select()和 poll()只支持水平触 发,而信号驱动 I/O 只支持边缘触发。性能表现上,epoll 同信号驱动 I/O 相似。但是,epoll 有一些胜过信号驱动 I/O 的优点。
- 可以避免复杂的信号处理流程(比如信号队列溢出时的处理)。
- 灵活性高,可以指定我们希望检查的事件类型(例如,检查套接字文件描述符的读就绪、写就绪或者两者同时指定)。
下面再来看一下epoll的API如何使用。
epoll
epoll主要包括 epoll_create()、epoll_ctl()、epoll_wait() 3个函数,使用起来,甚至比select更简单。
server.cpp
#include <iostream>
#include <cerrno>
#include <netinet/in.h> // ipv4: PF_INET,sockaddr_in ,v6:PF_INET6,sockaddr_in6
#include <sys/socket.h> // socket(),bind(),listen(),accept()
#include <unistd.h> // read(),close()
#include <arpa/inet.h> // inet_addr()
#include <fcntl.h> // fcntl()
#include <sys/epoll.h> // epoll
#include <vector> // vector
#include <cstring>
const int kSocketError = -1;
#define USE_ET // 启用边缘触发
void onNewConnect(const int &epFd, const int &listenFd) {
int clientFd = ::accept(listenFd, nullptr, nullptr);
if (clientFd == kSocketError) {
std::cout << "accept error:" << clientFd << std::endl;
return;
}
// 加入到兴趣列表
struct epoll_event ev{};
ev.events = EPOLLIN;
// 边缘触发模式,追加标志。使用'或'(|)拼接
#ifdef USE_ET
ev.events |= EPOLLET;
// 边缘触发模式,只支持非阻塞IO non-block
int ret = ::fcntl(clientFd, F_SETFL, O_NONBLOCK);
if (ret == kSocketError) {
std::cout << "fcntl error:" << errno << std::endl;
return;
}
#endif
ev.data.fd = clientFd;
if (::epoll_ctl(epFd, EPOLL_CTL_ADD, clientFd, &ev) == kSocketError) {
std::cout << "epoll_ctl error:" << errno << std::endl;
::close(clientFd);
}
if (ev.events & EPOLLET) {
std::cout << "new connect coming,set EPOLLET" << std::endl;
} else {
std::cout << "new connect coming" << std::endl;
}
}
#ifdef USE_ET
void onRead(const int &epFd, const int &fd, const int &listenFd, char recvBuffer[], int bufferLen) {
// 获取客户端IP
struct sockaddr_in peer{};
socklen_t len = sizeof(sockaddr_in);
if (::getpeername(fd, (sockaddr *) &peer, &len) == kSocketError) {
std::cout << "getpeername error" << strerror(errno) << std::endl;
::close(fd);
return;
}
// 边缘触发模式下,要一次性从socket的recv缓冲区中把数据读出来,
// 否则下一次不再触发读事件,导致数据丢失
// 注意:这里就会导致所谓的TCP粘包问题,应用层协议自己通过TLV处理,这里只是为了方便演示故简化
char *recvBufferStart = recvBuffer;
int ret = 0;
int recvTotalLen = 0;
while (true) {
ret = ::recv(fd, recvBufferStart, bufferLen - recvTotalLen, 0);
if (ret == 0) { // EOF,0代表对端断开连接,需要关闭socket
std::cout << "EOF: client " << fd << " close ths connection, " << inet_ntoa(peer.sin_addr) << ":"
<< ::ntohs(peer.sin_port) << std::endl;
// 移除
if (::epoll_ctl(epFd, EPOLL_CTL_DEL, fd, nullptr) == kSocketError) {
std::cout << "epoll_ctl error:" << errno << std::endl;
}
::close(fd);
break;
} else if (ret < 0) {
break;
}
recvTotalLen += ret;
recvBufferStart += ret;
}
if (ret == -1 && recvTotalLen == 0) {
std::cout << "recv error:" << errno << std::endl;
if (::epoll_ctl(epFd, EPOLL_CTL_DEL, fd, nullptr) == kSocketError) {
std::cout << "epoll_ctl error:" << errno << std::endl;
}
::close(fd);
} else {
std::cout << "recv from " << inet_ntoa(peer.sin_addr) << ":" << ::ntohs(peer.sin_port)
<< ": " << std::string(recvBuffer, recvTotalLen) << ",len=" << recvTotalLen << std::endl;
// echo
::send(fd, recvBuffer, recvTotalLen, 0);
}
}
#elif
void onRead(const int &epFd, const int &fd, const int &listenFd, char recvBuffer[], int bufferLen) {
// 获取客户端IP
struct sockaddr_in peer{};
socklen_t len = sizeof(sockaddr_in);
if (::getpeername(fd, (sockaddr *) &peer, &len) == kSocketError) {
std::cout << "getpeername error" << errno << std::endl;
return;
}
int ret = ::recv(fd, recvBuffer, bufferLen, 0);
if (ret == 0) { // EOF
std::cout << "EOF: client " << fd << " close ths connection, " << inet_ntoa(peer.sin_addr) << ":"
<< ::ntohs(peer.sin_port) << std::endl;
// 移除
if (::epoll_ctl(epFd, EPOLL_CTL_DEL, fd, nullptr) == kSocketError) {
std::cout << "epoll_ctl error:" << errno << std::endl;
}
::close(fd);
} else if (ret == -1) {
std::cout << "recv error:" << errno << std::endl;
if (::epoll_ctl(epFd, EPOLL_CTL_DEL, fd, nullptr) == kSocketError) {
std::cout << "epoll_ctl error:" << errno << std::endl;
}
::close(fd);
} else {
std::cout << "recv from " << inet_ntoa(peer.sin_addr) << ":" << ::ntohs(peer.sin_port)
<< ": " << recvBuffer << ",len=" << ret << std::endl;
// echo
::send(fd, recvBuffer, ret, 0);
}
}
#endif
void onClose(const int &epFd, const int &fd) {
std::cout << "remove close connection" << std::endl;
if (::epoll_ctl(epFd, EPOLL_CTL_DEL, fd, nullptr) == kSocketError) {
std::cout << "epoll_ctl error:" << errno << std::endl;
}
}
bool setNoBlock(const int &fd) {
// non-block
int ret = ::fcntl(fd, F_SETFL, O_NONBLOCK);
if (ret == kSocketError) {
std::cout << "fcntl error:" << errno << std::endl;
}
return ret != kSocketError;
}
/** @fn main
* @brief 演示socket的基础调用demo,使用了epoll I/O复用模型(Linux下执行man epoll命令查看API说明,相比select更简洁,只有3个系统调用:epoll_create(),epoll_ctl(),epoll_wait())。
* 优点:
* 1. 相比select/poll,改进了扫描算法(o(1)),常量时间复杂度使性能和连接数无关,做到万甚至10万级别的连接。
* 2. 相比select,没有最大数量限制。只取决于操作系统最大可打开文件的句柄数(可更改,通过ulimit -a查看)
* 缺点:
* 1. Linux特有,无法移植
* 2. 只适用于连接数很多,但是不怎么活跃的场景。如果每个连接都很活跃(参考视频直播,无时无刻都在传输数据),性能退化,甚至不如poll
* @return
*/
int main() {
int listenFd = 0;
int ret = 0;
int yesReuseAddr = 1;
struct sockaddr_in addr{};
int epFd = 0; // epoll实例
int maxFiles = 1024; // 最大可打开文件的数量
int fdNum = 0; // epoll_wait返回产生事件的描述法数量
#ifdef USE_ET
char recvBuffer[10 * 1024] = {0}; // 接收缓冲区,边缘触发模式下要一次性读完,所以缓冲区要大一些
#elif
char recvBuffer[1024] = {0}; // 接收缓冲区
#endif
// get max open file
maxFiles = static_cast<int>(::sysconf(_SC_OPEN_MAX));
if (maxFiles == kSocketError) {
return 0;
}
std::cout << maxFiles << " max file can open" << std::endl;
// create socket
listenFd = ::socket(PF_INET, SOCK_STREAM, 0);
if (listenFd == kSocketError) {
std::cout << "create socket error:" << errno << std::endl;
return 0;
}
std::cout << "create socket" << std::endl;
// non-block
if (!setNoBlock(listenFd)) {
return 0;
}
// SO_REUSEADDR
if (::setsockopt(listenFd, SOL_SOCKET, SO_REUSEADDR, &yesReuseAddr, sizeof(yesReuseAddr)) == kSocketError) {
std::cout << "setsockopt error:" << errno << std::endl;
return 0;
}
addr.sin_family = AF_INET;
addr.sin_port = htons(8088);
addr.sin_addr.s_addr = inet_addr("127.0.0.1");
ret = ::bind(listenFd, (sockaddr *) &addr, sizeof(addr));
if (ret == kSocketError) {
std::cout << "bind socket error:" << errno << std::endl;
return 0;
}
std::cout << "bind success,start listen..." << std::endl;
// 标识文件描述符为被动socket
ret = ::listen(listenFd, SOMAXCONN);//SOMAXCONN in ubuntu 4096,in centos7,128
if (ret == kSocketError) {
std::cout << "listen error:" << errno << std::endl;
return 0;
}
maxFiles /= 2;
epFd = ::epoll_create(maxFiles); // 只是告诉内核一个大致数目,不是最大数量
if (epFd == kSocketError) {
std::cout << "epoll_create error" << errno << std::endl;
return 0;
}
// listen的socket加入到epoll监听列表
struct epoll_event ev{};
ev.events = EPOLLIN | EPOLLET;
ev.data.fd = listenFd;
ret = ::epoll_ctl(epFd, EPOLL_CTL_ADD, listenFd, &ev);
if (ret == kSocketError) {
std::cout << "epoll_ctl error:" << errno << std::endl;
return 0;
}
struct epoll_event events[maxFiles];
for (;;) {
int timeout = 10 * 1000; // actually 200 ms
// o(1) 时间复杂度,epoll会直接告诉我们那些socket可读可写而不需要我们自己去遍历
// 这里会阻塞,超时或者某个socket fd上有可读可写事件时,继续
fdNum = ::epoll_wait(epFd, events, maxFiles, timeout);
// 这是select模型的写法,o(n)时间复杂度,需要我们自己遍历,去找那个socket fd上可读
//for (auto it = connections.begin(); it != connections.end();) {
// int sockFd = *it;
// if (!FD_ISSET(sockFd, &readFds))
if (fdNum == -1) {
std::cout << "epoll_wait error:" << errno << std::endl;
continue;
} else if (fdNum == 0) {
std::cout << "epoll_wait timeout:" << errno << std::endl;
continue;
}
for (int i = 0; i < fdNum; ++i) {
const epoll_event &e = events[i];
int fd = e.data.fd;
if (e.events & EPOLLIN) {
if (fd == listenFd) {// 监听socket上读事件,代表新的连接到来
onNewConnect(epFd, listenFd);
} else {
onRead(epFd, fd, listenFd, recvBuffer, sizeof(recvBuffer));
}
}
#ifdef EPOLLRDHUP
else if (e.events & EPOLLRDHUP) { // linux 2.6.17 以上
onClose(epFd, fd);
}
#endif
else if (e.events & (EPOLLHUP | EPOLLERR | EPOLLPRI)) { // 挂断、错误、收到高优先级数据都需要关闭连接
onClose(epFd, fd);
}
}
}
return 0;
}
我们可以通过对 单线程+阻塞I/O下面的client.cpp 进行改造,来测试该模型下能支持多少个连接。
client.cpp
#include <iostream>
#include <cerrno>
#include <thread>
#include <sys/socket.h> // bind,connect
#include <netinet/in.h> // sockaddr_in
#include <arpa/inet.h> // inet_addr()
#include <unistd.h> // close
#include <functional>
#include <cstring>
const int kSocketError = -1;
void robot(int id) {
int fd = socket(PF_INET, SOCK_STREAM, 0);
if (fd == kSocketError) {
std::cout << "socket error:" << errno << std::endl;
return;
}
struct sockaddr_in serverIp{};
serverIp.sin_family = AF_INET;
serverIp.sin_port = htons(8088);
serverIp.sin_addr.s_addr = inet_addr("127.0.0.1");
int ret = ::connect(fd, (sockaddr *) &serverIp, sizeof(serverIp));
if (ret == kSocketError) {
std::cout << "connect error:" << strerror(errno) << std::endl;
return;
}
std::cout << id << " connect remote success" << std::endl;
// recv 5秒超时
struct timeval timeout = {5, 0};
// send 超时 这样设置
//ret = ::setsockopt(fd, SOL_SOCKET, SO_SNDTIMEO, (char *) &timeout, sizeof(timeout));
ret = ::setsockopt(fd, SOL_SOCKET, SO_RCVTIMEO, (char *) &timeout, sizeof(timeout));
if (ret == kSocketError) {
std::cout << "setsockopt err" << errno << std::endl;
return;
}
char buffer[1024] = {0};
char recvBuffer[1024] = {0};
for (int i = 0; i < 10; ++i) {
long sleep = ::random() % 3000 + 3000;
std::this_thread::sleep_for(std::chrono::milliseconds(sleep));
int len = sprintf(buffer, "hello %d", i);
std::cout << "send " << std::endl;
ret = ::send(fd, buffer, len, 0);
if (ret == kSocketError) {
std::cout << "send error:" << errno << std::endl;
break;
}
ret = ::recv(fd, recvBuffer, sizeof(recvBuffer), 0);
if (ret == kSocketError) {
std::cout << "recv error:" << errno << std::endl;
continue;
}
std::cout << "recv from:" << recvBuffer << std::endl;
}
::close(fd);
std::cout << "close " << id << std::endl;
}
int main() {
::srandom(time(nullptr));
const int clientNum = 1000;
for (int i = 0; i < clientNum; ++i) {
std::thread t(robot, i);
t.detach();
std::this_thread::sleep_for(std::chrono::seconds(1));
}
// wait client exit
std::this_thread::sleep_for(std::chrono::seconds(60));
return 0;
}
所有代码在这里:github
至此,三种I/O模型介绍完毕,下面再补充介绍一下epoll的2种模式:
- LT:水平触发(默认),epoll 会告诉我们何时能在文件描述符上以非阻塞的方式执行 I/O 操作,对于存在未读完的数据,下一次调用epoll_wait时还会触发。
- 优点:简单,易于编码,未读完的数据下次还能继续读,不易遗漏
- 缺点:在并发量高的时候,epoll_wait返回的就绪队列比较大,遍历比较耗时。因此LT适用于并发量小的情况
- ET:边缘触发,和LT相比,无论是否读完,只触发一次,直到下一次EPOLLIN事件到来。ET模式在很大程度上减少了epoll事件被重复触发的次数,因此效率要比LT模式高。只支持非阻塞I/O,以避免由于一个文件句柄的阻塞读/阻塞写操作把处理多个文件描述符的任务饿死。
- 优点:并发量大的时候,就绪队列要比LT小得多,效率更高
- 缺点:复杂,难以编码,需要一次读完,有时会遗漏;可能会遇到文件描述符饥饿问题(有1个描述符上有大量的输入,使其他描述符处于饥饿状态),解决方法是使用轮转调度(round-robin,一个实现:muduo/EventLoopThreadPoll.cc::getNextLoop)算法,但是引入了额外的复杂度。
参考:
三种I/O模型比较
2种设计模式
在初步掌握了epoll的api之后,我们需要更进一步探讨一下实际的环境中是如何使用epoll的。
因为I/O Multiplexing技术的出现,目前市面上高性能的主流开源网络库使用的事件驱动模型主要分成2大阵营:
- Reactor模型(反应器):以Linux(epoll)、Darwin/MacOS(kqueue)2个平台为主,是Linux下开发网络服务器程序的主流模型。使用这种模型的有:
- muduo, evpp
- libevent, libev
- ACE, Poco C++ Libraries
- Java NIO,包括 Apache Mina 和 Netty
- Preactor模型(主动器):epoll由于是Linux特有,故Windows下对应的是IOCP(Input/Output Completion Port)技术,该模型通常在Windows上使用。不过跨平台的 asio 库(据说会作为C++20的网络标准库)也是使用的这种模型,可能是为了兼容Windows。
这2种模型最本质的区别是:Reactor使用的是同步非阻塞I/O,而Preactor使用的是异步(非阻塞?)I/O(需要操作系统支持),当下Preactor用的不多,Linux/MacOS下主要以Reactor为主。
Reactor(Unix)
简单的来说,Reactor模型就是 non-blocking IO + IO Multiplexing,它的本质是 事件驱动编程 的一种实现,事件驱动在各种界面开发(Web/Windows/iOS/Android)下会经常用到,比如html中 input(按钮) 提供了 onclick() 事件,当鼠标点击时,则由浏览器回调指定的函数进行相关的操作。
根据《Pattern-oriented software architecture. Volume 2》中对Reactor的解释,主要包含以下5个部分:
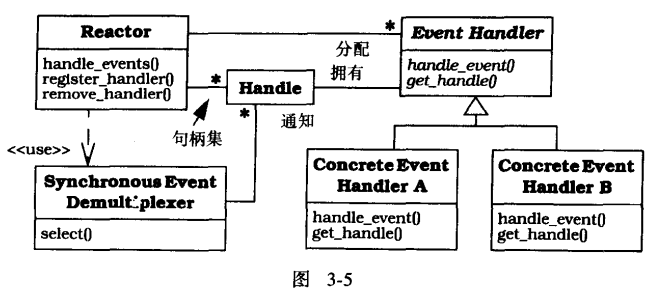
- Handle(句柄集事件源):在Linux中指文件描述符,以socket fd举例,其上的I/O事件由操作系统触发,这样我们可以使用 accept() 或者 recv()/read() 进行新连接的建立和数据收发处理。
- Synchronous Event Demultiplexer(同步事件多路分发器):通常指select/poll,epoll等I/O多路复用,程序首先将Handle(句柄)以及对应的事件注册到Synchronous Event Demultiplexer上;当有事件到达时,Synchronous Event Demultiplexer就会通知Reactor调用事件处理程序进行处理。
- Reactor(反应器):提供注册和移除事件的功能,以及执行事件循环,不停的接收系统触发的事件,当有事件进入”就绪”状态时,调用注册事件的回调函数处理事件。
- Event Handler(事件处理程序):定义了一个接口(回调函数),主要是给具体事件处理程序传递事件数据。
- Concrete Event Handler(具体事件处理程序):事件的真正处理者,将处理结果写入到句柄上,返回给调用者。
时序图如下:
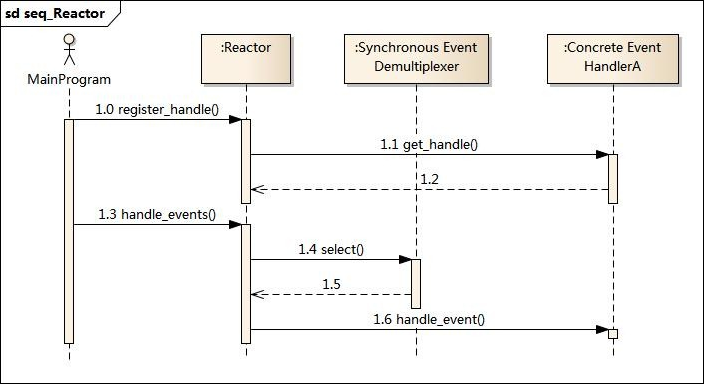
- 应用启动,将关注的事件handle注册到Reactor中。
- 调用Reactor,进入无限事件循环,等待注册的事件到来。
- 事件到来,select返回,Reactor将事件分发到之前注册的回调函数中处理。
java.util.concurrent 包的作者Doug Lea,在 《Scalable IO in Java》(翻译) 一篇分享中对Reactor模型的使用方式进行了归纳:
- 单Reactor单线程模型
- 单Reactor多线程模型
- 主从Reactor多线程模型
在介绍这些模式之前,我们先来看一下EventLoop是什么东西。
EventLoop(事件循环)
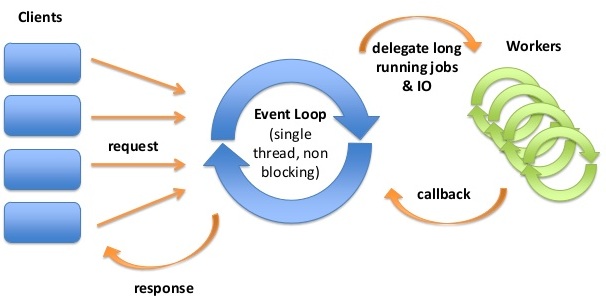
EventLoop,也就是事件循环,主要的功能是:
-
封装epoll,对外提供类似 run() 函数(libevent是event_base_dispatch),其内是一个无限循环,不停的调用 epoll_wait(),处理I/O事件,回调到对应的socket fd对象进行处理。示例代码如下(来自于muduo/EventLoop.cc):
-
处理Socket I/O事件的同时,提供定时器任务的支持。高性能定时器的实现可以参考这里。
下面,我们通过一段具体的代码来看一下什么叫事件循环(来自于TeamTalk,server/src/base/EventDispatch.cpp):
void CEventDispatch::StartDispatch(uint32_t wait_timeout)
{
struct epoll_event events[1024];
int nfds = 0;
if(running)
return;
running = true;
while (running)
{
// 封装epoll_wait(),等待Socket I/O事件
nfds = epoll_wait(m_epfd, events, 1024, wait_timeout);
for (int i = 0; i < nfds; i++)
{
int ev_fd = events[i].data.fd;
CBaseSocket* pSocket = FindBaseSocket(ev_fd);
if (!pSocket)
continue;
#ifdef EPOLLRDHUP
if (events[i].events & EPOLLRDHUP)
{
//log("On Peer Close, socket=%d, ev_fd);
pSocket->OnClose();
}
#endif
// Commit End
if (events[i].events & EPOLLIN)
{
//log("OnRead, socket=%d\n", ev_fd);
pSocket->OnRead();
}
if (events[i].events & EPOLLOUT)
{
//log("OnWrite, socket=%d\n", ev_fd);
pSocket->OnWrite();
}
if (events[i].events & (EPOLLPRI | EPOLLERR | EPOLLHUP))
{
//log("OnClose, socket=%d\n", ev_fd);
pSocket->OnClose();
}
pSocket->ReleaseRef();
}
// 处理定时器任务
_CheckTimer();
_CheckLoop();
}
}
看完代码,不难明白所谓的EventLoop本质上就是个无限循环,通过不停的调用epoll_wait()监听socket文件句柄集合上的读写事件,然后回调处理。
单Reactor单线程模型
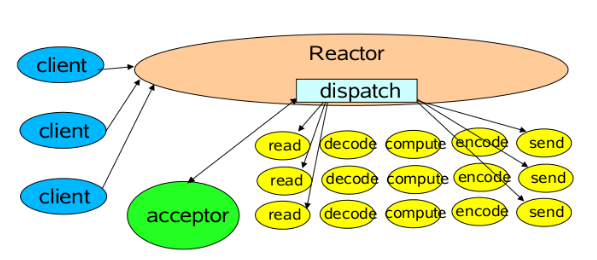
这是最基础简单的模型,所有的I/O操作都在一个线程上完成:
- 接收客户端的TCP连接。
- 读取客户端的请求消息。
- 向客户端发送应答或者通知消息。
该模型适合请求能快速处理完成,没有阻塞的场景。对于一些小容量应用场景,可以使用单线程模型,但是对于高负载、高并发的应用却不合适,主要原因如下:
- 并发问题。一个Reactor线程同时处理成百上千的链路,性能上无法支撑。即便单CPU负荷达到100%,也无法满足海量消息的编码、解码、读取和发送;
- 吞吐量问题。当Reactor线程负载过重之后,处理速度将变慢,这会导致大量客户端连接超时,超时之后往往进行重发,这更加重了Reactor线程的负载,最终导致大量消息积压和处理超时,Reactor线程成为系统的性能瓶颈;
- 可靠性问题。一旦Reactor线程意外故障,或者进入死循环,会导致整个系统通讯模块不可用,不能接收和处理外部信息,造成节点故障。
故实际中使用的不多,同时为了解决这些问题,演化出了多线程模型。
单Reactor多线程模型
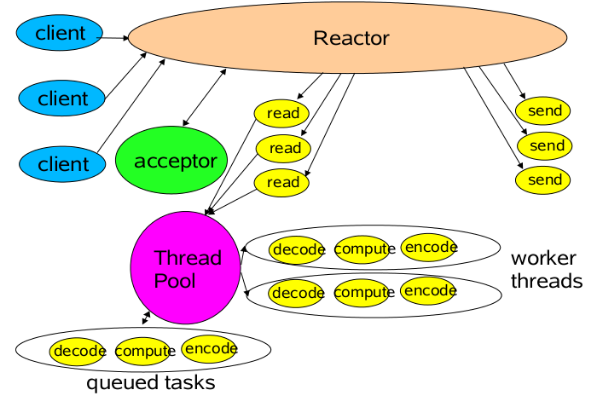
Reactor多线程模型与单线程模型最大区别,就是分离事件循环和事件处理到不同的线程中,具体如下:
- 在EventLoop事件循环的线程中,接收客户端的TCP连接请求(即执行 accept 系统调用)。
- 事件的处理分离到线程池中完成。如对客户请求进行解码、计算、编码,之后再给客户端回复响应等等。同时因为引入了线程池,事件处理的阻塞不会导致新客户端的连接无法建立。
- 1个线程可以同时处理多个TCP链路,但是1个TCP链路只对应1个线程,防止发生并发操作问题。
在绝大多数场景下,Reactor多线程模型都可以满足性能需求。但是,在极特殊应用场景中,一个线程负责监听和处理所有的客户端连接可能会存在性能问题。例如百万客户端并发连接,或者服务端需要对客户端的握手信息进行安全认证,认证本身非常损耗性能。这类场景下,单独一个Acceptor线程可能会存在性能不足问题,为了解决性能问题,产生了第三种Reactor线程模型——主从Reactor多线程模型。
多Reactor多线程模型
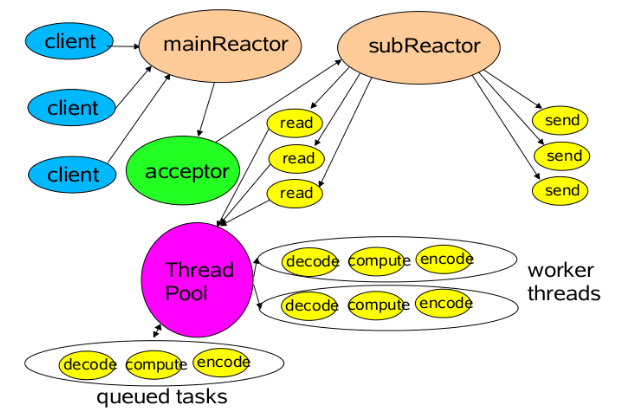
特点如下:
- 服务端用于接收客户端连接的不再是1个单独的线程,而是一个独立的线程池,我们暂且管它叫Acceptor线程池吧。
- Acceptor接收到客户端TCP连接请求处理完成后(可能包含接入认证等),将新创建的TcpConnection实例注册到I/O线程池(sub reactor线程池)的某个I/O线程上,由它负责TcpConnection的读写和编解码工作。
Acceptor线程池只用于客户端的登录、握手和安全认证,一旦链路建立成功,就将链路注册到后端subReactor线程池的I/O线程上,由I/O线程负责后续的I/O操作。
和上一个模型相比:
- 改进的部分是将Reactor分成了两个部分:mainReactor和subReactor。
- mainReactor:负责监听server socket,accept新连接,并将建立的socket分派给subReactor。
- subReactor:负责多路分离已连接的socket,读写网络数据,然后分发事件到业务处理线程池worker执行后续的业务逻辑。通常,subReactor个数上可与CPU个数等同。
参考:
- 《Scalable IO in Java》译文
- Java-彻底弄懂netty-程序员必须了解的Reactor模式-知识铺
- 深入理解Reactor 网络编程模型
- 【NIO系列】——之Reactor模型
- Proactor 与 Reactor
- Netty中的三种Reactor(反应堆)
Preactor(Windows)
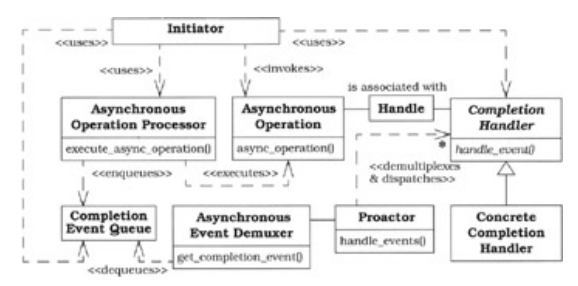
Proactor主动器模式包含如下角色
- Handle(句柄):用来标识socket连接或是打开文件。
- Asynchronous Operation Processor(异步操作处理器):负责执行异步操作,一般由操作系统内核实现。
- Asynchronous Operation(异步操作)。
- Completion Event Queue(完成事件队列):异步操作完成的结果放到队列中等待后续使用。
- Proactor(主动器):为应用程序进程提供事件循环;从完成事件队列中取出异步操作的结果,分发调用相应的后续处理逻辑。
- Completion Handler(完成事件接口):一般是由回调函数组成的接口。
- Concrete Completion Handler(完成事件处理逻辑):实现接口定义特定的应用处理逻辑。
时序图如下:
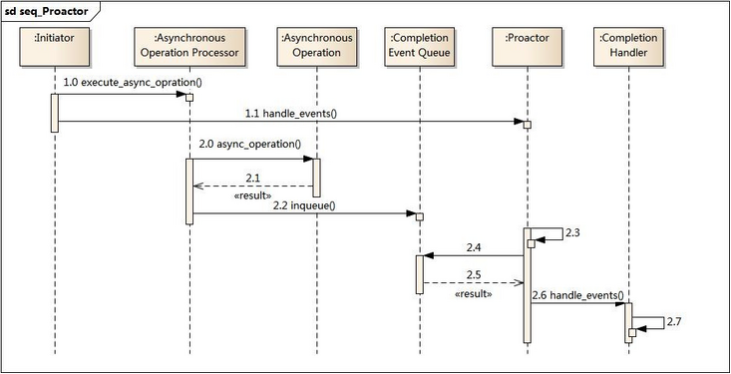
- 应用程序启动,调用异步操作处理器提供的异步操作接口函数,调用之后应用程序和异步操作处理就独立运行;应用程序可以调用新的异步操作,而其它操作可以并发进行;
- 应用程序启动Proactor主动器,进行无限的事件循环,等待完成事件到来;
- 异步操作处理器执行异步操作,完成后将结果放入到完成事件队列;
- 主动器从完成事件队列中取出结果,分发到相应的完成事件回调函数处理逻辑中;
Proactor和Reactor对比
- 优点
- Reactor实现相对简单,对于耗时短的处理场景处理高效;
- 操作系统可以在多个事件源上等待,并且避免了多线程编程相关的性能开销和编程复杂性;
- 事件的串行化对应用是透明的,可以顺序的同步执行而不需要加锁;
- 事务分离:将与应用无关的多路分解和分配机制和与应用相关的回调函数分离开来,
- Proactor性能更高,能够处理耗时长的并发场景;
- 缺点
- Reactor处理耗时长的操作会造成事件分发的阻塞,影响到后续事件的处理;
- Proactor实现逻辑复杂;依赖操作系统对异步的支持,目前实现了纯异步操作的操作系统少,实现优秀的如windows IOCP,但由于其windows系统用于服务器的局限性,目前应用范围较小;而Unix/Linux系统对纯异步的支持有限,应用事件驱动的主流还是通过select/epoll来实现;
- 适用场景
- Reactor:同时接收多个服务请求,并且依次同步的处理它们的事件驱动程序;
- Proactor:异步接收和同时处理多个服务请求的事件驱动程序;
参考:
- 《面向模式的软件体系结构 卷2》
- 《面向模式的软件架构 卷4》
- IO设计模式:Reactor和Proactor对比
延伸阅读
关于共享内存
在传统的企业中,私有化部署的时候,可能需要我们把所有的服务都部署到一台机器上。然而,在设计之初,这些模块(进程)之间就是使用socket进行通信的。即使使用127.0.0.1回环地址,不经过网卡,也会涉及到数据的拷贝,特别是在数据包很大的场景(比如视频直播、文件传输),这种额外的开销代码很大,这个时候更好的做法是通过共享内存的方式在进程间共享,避免多余的拷贝。只不过,具体实践难度如何,需要读者自行判断。
零拷贝
TCP的零拷贝
TCP用户态和内核态
参考: